Fabrice Mayran de Chamisso
Tel: 00331.64.78.16.14
68 rue du Général Leclerc
77140 Nemours, France
LinkedIn: click here
CV (3p.) | resume (1p.)
Navigate to:
fabrice[dot]mayran_de_chamisso[_at_]centraliens[dot]net
Lifelong Exploratory Navigation
I define Lifelong Exploratory Navigation (or LEN)
as the capacity of a mobile entity
(either living or robotic) to move in a partially unknown environment,
which requires constant adaptation to the environment,
notably including learning, updating, using and forgetting a mental
representation of this environment.
This paradigm is the core of my PhD work at CEA LIST.
The whole description can be found within my thesis (defended 2016/18/11), which will be released to the public in 2018 only
(due to intellectual property issues). (more)
Contrary to existing paradigms describing robot motion which consider a small number
of missions executed in a finite environment, LEN considers the environment in which the
robot evolves as potentially inifinite. Moreover, the robot is never reset, similarly to living beings.
It never stops learning and forgetting parts of the environment. LEN requires an integration of
SLAM,
path planning and physical navigation (which we call PNSLAM), where integration means that none ot these three problems can be considered
independently of the others. For instance, the SLAM algorithm may request a trajectory change to the path planning
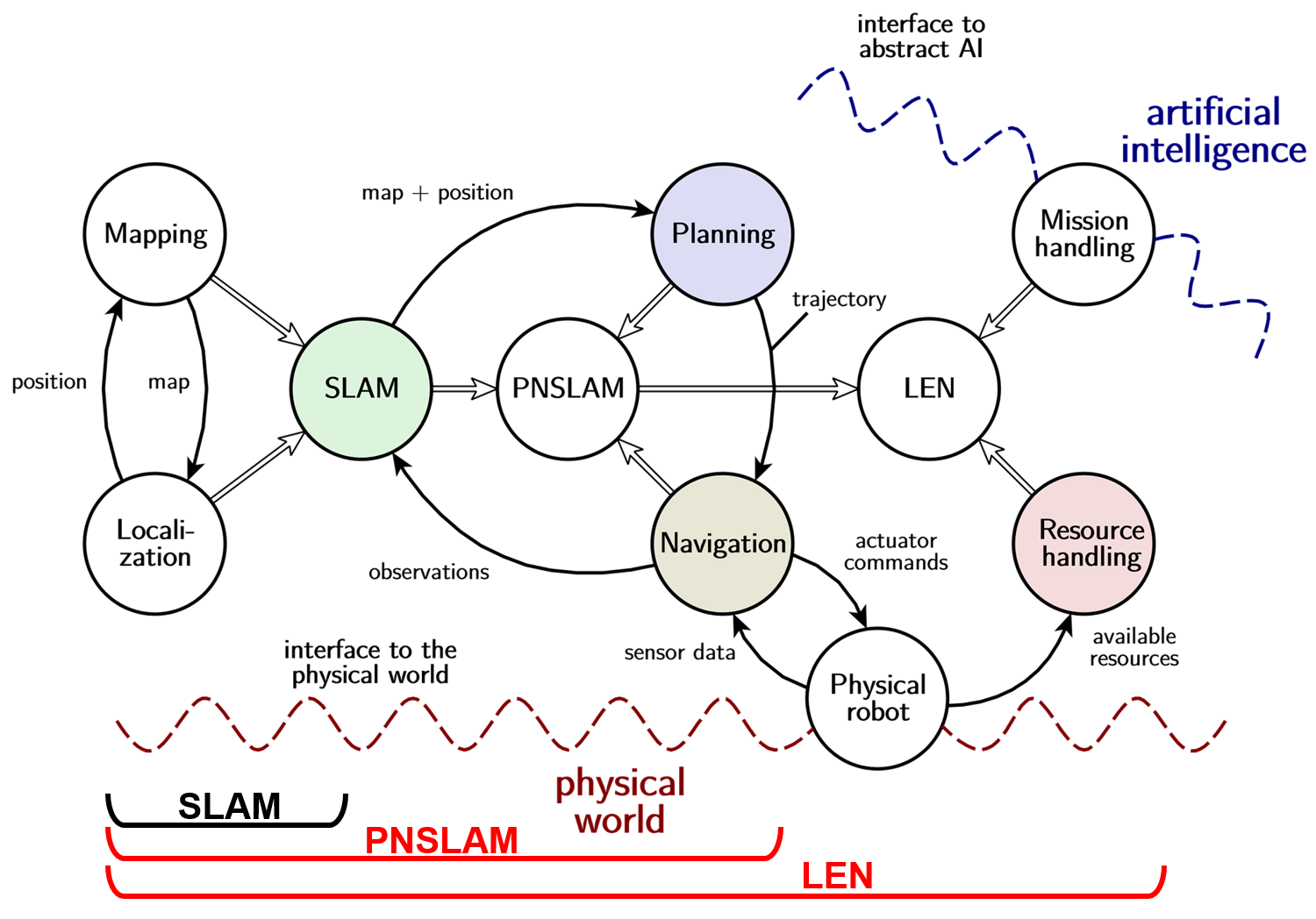
algorithm in order to confirm that the robot is where it thinks it is. Figure 1 below shows how LEN can be built from existing approaches.
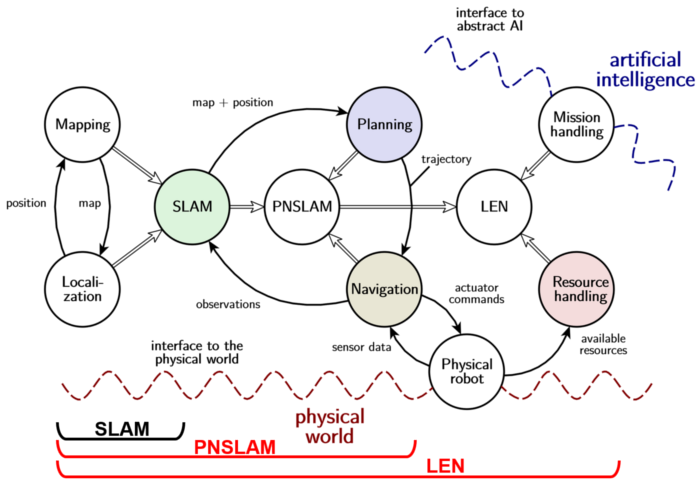
Figure 1: Lifelong Exploratory Navigation - general architecture.
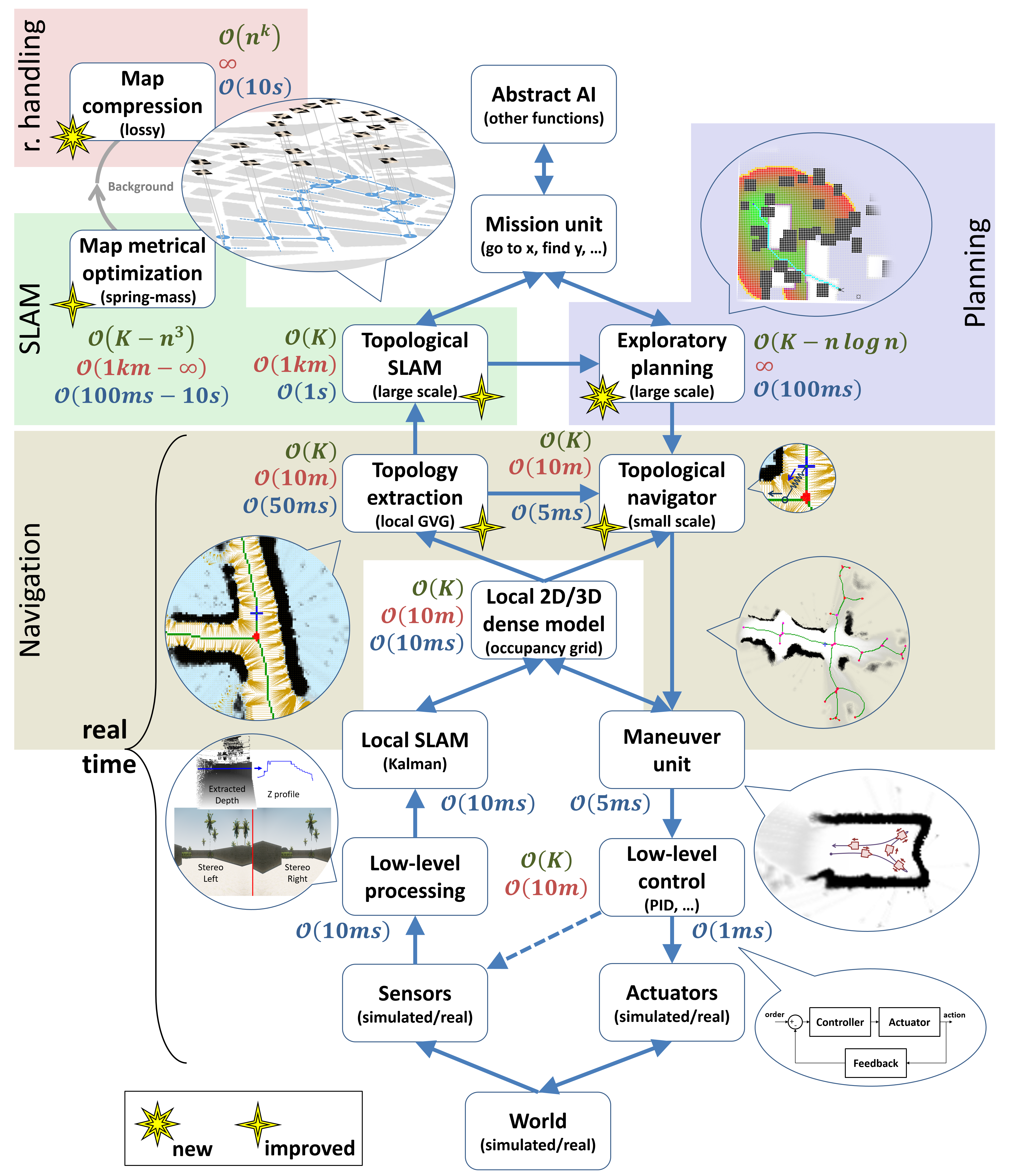
Implementation of LEN on a mobile robot navigating in an essentially 2D world is described in Figure 2. This implementation was tested on a Pioneer 3 robot (Figure 3).
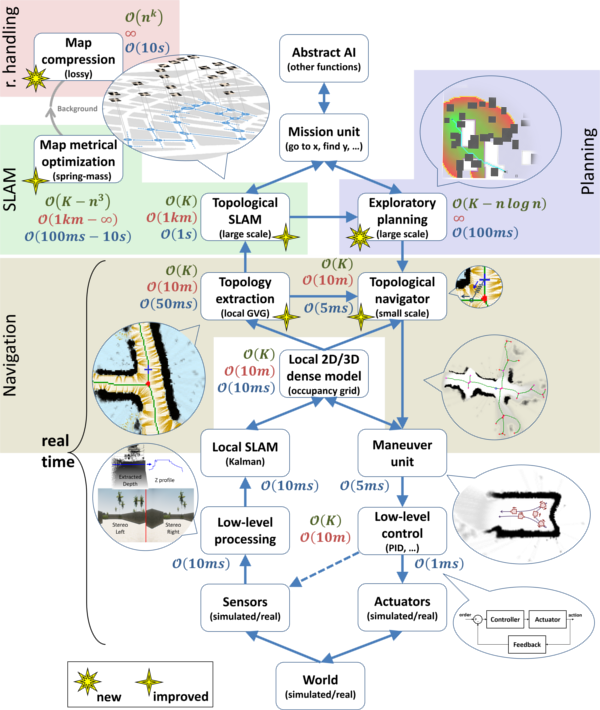
Figure 2: Lifelong Exploratory Navigation - 2D implementation. Space scales in red,
execution time in blue and algorithmic complexities in green,
with N the size of the environment (or number of observed features). I heavily modified or coded from scratch the blocks marked with a yellow symbol.

Figure 3: The pioneer 3 robot equipped with a Kinect 1 camera (used only for depth sensing) and a simple MEMS magnetometer mounted on top of a cardboard box
(to avoid magnetic interference from other components aboard the robot) was used for Lifelong Exploratory Navigation experiments.
(less)
Ultrafast plasmonics in metal nanoparticles
Ultrafast plasmonics in metal nanoparticles (see
this page) is one of the long-running research subjects at LPQM-ECP.
I have contributed to the simulation part of the subject. More precisely, I coded a
Finite Differences Time domain (FDTD) simulator to study the interactions of plasmonic phenomena and a photonic structure
(that is, more or less, a structure with features at the scale of the wavelength or smaller). This simulator, called CPSim, is described
here with some videos. Simulating plasmonic phenomena and especially ultrafast transient plasmonic phenomena is not an easy task.
Notably, materials with a plasmon resonance are much harder to model than their non-plasmonic counterparts. More details as well as videos can be found along the description of CPSim
(here).